 |
懳嬻愴丒俿俵俢 |
|
||||||||
抏摴抏偺旘隳媄弍偺婎慴 |
| 丂丂巒傔偵 |
| 丂丂儘働僢僩悇恑偵傛傞旘隳抜奒 乮Powered Flight乯丂仼 尰嵼偺暸 |
| 丂丂戝婥寳嵞撍擖抜奒 乮Re-entry Phase乯 |
| 丂丂丂丂丂嵞撍擖抏摴偺寛掕 |
| 丂丂丂丂丂崅擬懳嶔 |
| 丂丂抏摴偺岆嵎 |
| 丂丂傑偲傔 |
抏摴抏懪偪忋偘偺嵟弶偺抜奒偱偁傞 儘働僢僩悇椡偵傛傞旘隳抜奒 乮Powered Flight乯 偼丄抧忋偺敪幩婡偐傜儘働僢僩悇恑偵傛傝戝婥寳奜傑偱懪忋偘偰丄強掕偺懍搙偱強掕偺抏摴婳摴偵忔偣傞 乮亖 儘働僢僩丒僄儞僕儞偺擱從廔椆乯 傑偱偺婜娫偱偡丅
偙偺戞侾抜奒偼丄峏偵師偺俁偮偺抜奒偵嵶暘偝傟傑偡丅
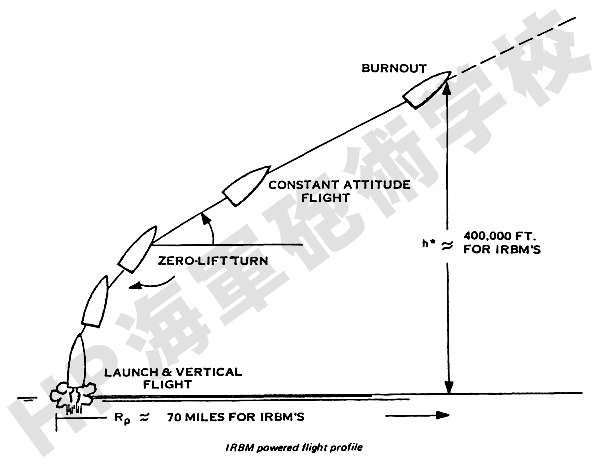
丂丂丂丂丂敪幩偲悅捈旘隳 乮Launch and Vertical Flight乯
丂丂丂丂丂柍梘椡旘隳 乮Zero-Lift Flight乯
丂丂丂丂丂掕巔惃旘隳 乮Constant Attitude Flight乯
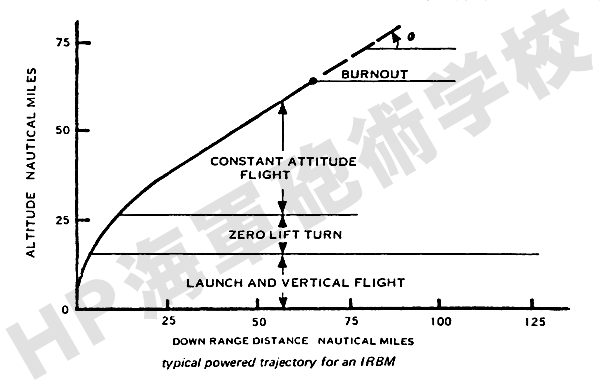
乮 恾 丗 Typical powered trajectory for IRBM 乯
旘隳嫍棧偑抁偔偦偺戝晹暘偑戝婥寳撪偱偁傞 俽俼俛俵 傪彍偔偲丄婎杮揑偵 俬俼俛俵 埲忋偺抏摴抏偼抧忋偺敪幩戜偐傜悅捈偵敪幩偝傟丄堷偒懕偒抁婜娫偦偺傑傑悅捈偵忋徃偟傑偡丅
偦偙偱慜夞偍恞偹偟偨偙偺 乬壗屘悅捈偵懪偪忋偘傞偺偐乭 偲偄偆偙偲偱偡丅
偙傟偵偮偄偰偼懡偔偺応崌丄戝婥寳傪憗偔敳偗偰嬻婥掞峈傪庴偗傞偙偲偺側偄恀嬻抏摴 乮曻暔慄乯 婳愓偵忔偣傞偨傔偨傔丄偲偄偆愢柧偑尒庴偗傜傟傞偙偲傪偛懚偠偺曽傕偍傜傟傞偲巚偄傑偡丅丂妋偐偵偙傟傕惓夝偺堦偮偱偼偁傝傑偡丅丂偟偐偟側偑傜丄杮摉偺棟桼偼師偺俁偮偺曽偑傛傝廳梫 側偺偱偡丅
傑偢堦偮栚偑丄嬻婥掞峈偲擱椏偺娭學偱偡丅丂儘働僢僩偵搵嵹偡傋偒昁梫側擱椏偺検偼丄懍搙偲旘隳嫍棧丄偦偟偰抏摴抏偺懪偪忋偘廳検偵斾椺偟傑偡丅丂偦偟偰偙偺偄偢傟偵傕戝偒偔塭嬁偡傞偺偑嬻婥掞峈偱偡丅
偙偺偨傔嬻婥枾搙偑擹偄丄懄偪嬻婥掞峈偑戝偒偄抧昞嬤偔傪壜擻側尷傝憗偔敳偗傞偨傔偵悅捈偵懪偪忋偘傞偙偲偑媮傔傜傟傑偡丅丂偙傟偵傛偭偰擱椏偺検傪彮側偔偰嵪傓傛偆偵偟丄偐偮懪偪忋偘廳検傪尭傜偡偙偲偑偱偒傑偡丅丂偦偟偰嬻婥偵傛傞杸嶤擬偺塭嬁傪嵟彮偵偡傞偙偲偑偱偒傑偡丅
斀懳偵丄傕偟懪偪忋偘廳検傪摨堦偲偡傞側傜偽丄擱椏偺昁梫検傪尭傜偣傟偽偦偺暘傛傝戝偒側搵嵹暔 乮payload乯 傪愊傓偙偲偑壜擻 偵側傞偙偲傪堄枴偟傑偡丅
擇偮栚偑抏懱偺峔憿偺栤戣偱偡丅丂壜擻側尷傝儁僀儘乕僪傪戝偒偔偟丄偐偮懪偪忋偘廳検傪偱偒傞偩偗彫偝偔偡傞偨傔偵偼丄抏摴抏偺抏懱峔憿偦偺傕偺傪壜擻側尷傝寉偔偡傞昁梫偑偁傝傑偡丅
偙偺偨傔捠忢偼丄抏懱偺抏幉 乮廲乯 曽岦偺嫮搙偼崅偔丄墶曽岦偺嫮搙偼斾妑揑掅偔偟偰尷掕揑側懴壛廳偺斖埻偱愝寁偝傟傞偙偲偵側傝傑偡丅丂偦偟偰丄偙傟傪悅捈偵懪偪忋偘傞偙偲偵傛偭偰丄壸廳傗嬻婥掞峈丄廳椡傪抏幉曽岦偱庴偗傞偙偲偱偙傟偵懳張偡傞偙偲偑壜擻偵側傝傑偡丅
偦偟偰嶰偮栚偑敪幩婡偺栤戣偱偡丅丂抏摴抏偑戝偒偔側傟偽側傞傎偳丄敪幩婡偺峔憿偑暋嶨偲側傝廳検偑憹偊傑偡丅丂偙傟傪嵟彮偵墴偝偊傞偨傔偵偼丄抏摴抏傪悅捈偵曐帩偟偰偙偺忬懺偐傜懪偪忋偘傞偙偲偱偡丅
俁偮偲傕尵傢傟傟偽偡偖偵擺摼偱偒傞偙偲偽偐傝偱偡偑丄偙傟傜偺棟桼傪僉僠儞偲惍棟偟偰愢柧偟偰偄傞傕偺偼彮側偄偱偡偹丅
偙偺悅捈敪幩曽幃偱偡偑丄敪幩婡偵悅捈偵抲偐傟傞偑屘偵抏摴抏偺慡廳検偼壓偺敪幩戜 乮Launch Pad乯 偱巟偊傜傟丄偐偮儘働僢僩丒僄儞僕儞偵揰壩屻丄悇椡偑廫暘側儗儀儖偵忋徃偡傞傑偱偺娫丄敪幩戜偵傛傝抏摴抏偺壓晹傪峉懇偡傞傛偆偵側偭偰偄傑偡丅
偦偟偰偙偺悅捈敪幩偵偍偄偰嵟傕廳梫側揰偼丄儘働僢僩丒僄儞僕儞偵揰壩捈屻偺懍搙偑傑偩僛儘偵嬤偄嵟弶偺悢昩娫丄抏摴抏偺巔惃傪悅捈偵曐偨側偗傟偽側傜側偄偙偲偱偡丅
偙傟偼丄敪幩帪偺抏懱偺墶曽岦偵壛傢傞奜椡丄椺偊偽撍晽偵傛傞曃埵傗孹偒側偳偵懳偟偰丄僄儞僕儞屻晹偵庢傝晅偗偨曃岦斅 乮deflecter vanes乯 傪憖嶌偟偰儘働僢僩暚幩偺棳傟偺岦偒傪曄壔偝偣丄偁傞偄偼儘働僢僩丒僄儞僕儞偦偺傕偺傪悅捈偵曐偮婡峔偵偡傞偙偲偵傛傝丄抏懱偺廲幉偵懳偡傞悇椡曽岦傪曄偊偰抏懱偺巔惃偺僶儔儞僗傪庢傞偙偲偱惂屼偟傑偡丅丂抏摴抏偵傛偭偰偼丄偙傟偵壛偊偰彫偝側曗彆儘働僢僩傪憰旛偟偰丄偙傟偵傛傝堦帪揑側僒僀僪丒僗儔僗僞乕偲偟偰巊偆傕偺傕偁傝傑偡丅
偙傟傜偵傛傞巔惃曐帩偼抏摴抏偺惂屼僔僗僥儉偵傛偭偰帺摦揑偵峴傢傟傑偡偑丄懪偪忋偘廳検偑戝偒偔側傟偽側傞傎偳崅搙側媄弍傪梫偡傞偙偲偼偍敾傝偄偨偩偗傞偲巚偄傑偡丅
慜弎偺傛偆偵丄拞嫍棧抏摴抏埲忋偼悅捈偵懪偪忋偘傜傟傞偙偲偵側傝傑偡偑丄偲偼尵偭偰傕尷傜傟偨搵嵹擱椏傪桳岠偵巊偆偵偼丄弌棃傞偩偗憗偄帪婜偵強梫偺懍搙傑偱壛懍偟偰杮棃偺抏摴婳愓偵忔偣傞傛偆偵偡傞偙偲偑岲傑偟偄偙偲偵偼曄傢傝偼偁傝傑偣傫丅
偦偙偱丄傑偩戝婥寳撪偱偼偁傝傑偡偑丄嬻婥枾搙偑偦傟側傝偵敄偔側偭偨偲偙傠傑偱忋徃偟偨偲偙傠偱丄彊乆偵彊乆偵 抏摴抏傪慁夞偝偣偰偄偔偙偲偵側傝傑偡丅
彊乆偵偲偄偄傑偡偺偼丄偙傟傕忋偺 乮侾乯 偱愢柧偟偨傛偆偵丄抏懱偺峔憿偼墶偐傜偺壸廳偵懳偟偰偼嫮偔偱偒偰偄傑偣傫偺偱丄敄偔側偭偨偲偼偄偊嬻椡揑偵惗偠傞慁夞壸廳偺塭嬁傪弌棃傞偩偗彫偝偔偟側偗傟偽側傜側偄偐傜偱偡丅
偙偺偨傔丄儘働僢僩偺悇椡偺曽岦傪彮偟曄偊偰偼尦偺抏幉 乮廲乯 曽岦偵栠偟丄傑偨彮偟曄偊偰偼栠偡偲偄偆偙偲傪婔搙偐孞傝曉偡偲偄偆曽朄傪偲傝傑偡丅丂悇椡偺僶儔儞僗傪偲傝側偑傜抏摴抏偺廳怱傪備偭偔傝堏摦偝偣偰丄彮検偐偮堦帪揑側慁夞儌乕儊儞僩偲側傞傛偆偵偟偰丄抏懱偵弌棃傞偩偗墶壸廳偑偐偐傜側偄傛偆偵惂屼僔僗僥儉偵傛偭偰怲廳偵僐儞僩儘乕儖偟偰偄偔偺偱偡丅
偙偺慁夞偺偙偲傪 乽柍梘椡慁夞乿 乮zero-lift turn乯 偁傞偄偼 乽廳椡慁夞乿 乮gravity turn乯 偲尵偄傑偡丅
傎傏戝婥寳傪敳偗偩偟丄偐偮柍梘椡慁夞傪廔偊偰幩妏 乮冇乯 偲側偭偨側傜偽丄崱搙偼捈恑偟偰強梫偺抏摴傪昤偔偵昁梫側懍搙 乮倁仏乯 傑偱壛懍偡傞偙偲偵側傝傑偡丅丂偙偺帪丄嬻婥掞峈偼傎傏柍帇偱偒傞傛偆偵側傝傑偡偺偱丄壓恾偺傛偆偵抏摴抏偼廳椡偵墳偠偨暘偩偗偺忋岦偒巔惃偱捈恑偟傑偡丅
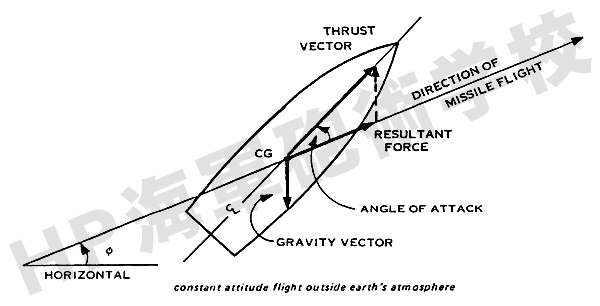
乮 恾 丗 constant attitude flight outside earth's atmosphere 乯
抏摴抏偼旘隳宱楬偵懳偟偰堦掕偺忋岦偒巔惃傪堐帩偟偰旘隳偟傑偡偺偱丄偙偺抜奒傪 乽掕巔惃旘隳乿 偲尵偄傑偡丅
偙偺帪偺幩妏 乮冇乯 偼丄強梫偺抏摴婳愓偲側傞偨傔偺嵟廔揑側儘働僢僩擱從廔椆帪偺嬄妏 乮burnout angle乯 乮冇仏乯 偲 傎傏 摨偠偲側傝傑偡丅丂椉幰偺嵎偺戝晹暘偼嬐偐偲偼偄偊嬻婥掞峈偵懳偡傞廋惓偺暘偱偡偑丄偙傟偵傛傞抏懱偵懳偡傞墶壸廳偼婛偵柍帇偱偒傞掱搙偺傕偺偲側偭偰偄傑偡丅
儘働僢僩偺擱從廔椆帪偵嬤偔側傞偲丄桿摫僔僗僥儉傛偭偰悇椡偺岦偒傪嬐偐偵曄偊偰丄嵟廔揑偵抏摴抏偑惓妋側懍搙曽岦偲側傞傛偆偵旝廋惓偟傑偡丅
偦偟偰強梫偺懍搙偱強梫偺抏摴婳愓偵忔偭偨偲偙傠偱丄桿摫僔僗僥儉偵傛傝儘働僢僩偺擱從傪掆巭偟傑偡丅
戞侾抜奒偵偍偗傞嵟廔揑側擱從廔椆崅搙 乮burnout altitude乯 乮倛仏乯 偲旘隳悈暯嫍棧 乮俼倫乯 偼丄屄乆偺抏摴抏偵娭偡傞嬶懱揑側僨乕僞偑偁傟偽寁嶼丄偁傞偄偼嶌恾偑壜擻偱偡丅丂堦斒揑側 俬俼俛俵 偺応崌傪椺偵偲傞偲丄壓恾偵帵偡傛偆偵側傝傑偡丅
乮 恾 丗 typical powered trajectory for an IRBM 乯
戝懱偵偍偄偰丄擱從廔椆崅搙 乮倛仏乯 偼栺係侽枩僼傿乕僩 乮栺侾俀丏俀倠倣乯 慜屻丄旘隳悈暯嫍棧 乮俼倫乯 偼栺俈侽儅僀儖 乮栺侾俁侽倠倣乯 掱搙偱偡丅
偙傟偑俬俠俛俵偵側傝傑偡偲丄儘働僢僩悇恑偺帪娫偼傛傝挿偔側傝丄幩妏偼彫偝偔側傝傑偡丅丂堦斒揑側俬俠俛俵偺応崌丄倛仏 偼戝杴侾侽侽枩僼傿乕僩 乮栺俁侽倠倣乯丄俼倫 偼侾侽侽乣侾俀俆儅僀儖 乮栺侾俉俆乣俀俁俀倠倣乯 掱搙偱偡丅
偙偺掕巔惃旘隳偐傜愭偼丄抏摴抏偼恀嬻拞偵偍偗傞抏摴婳愓傪昤偔丄戞俀抜奒偺 乽帺桼旘隳乿 乮Free Flight乯 偵側傝傑偡丅丂偙偺帺桼旘隳抜奒偵偮偄偰偼丄拞妛傗崅峑偺暔棟偱廗傢傟偨曻暔慄偺偙偲偲摨偠偱偡偺偱丄愢柧偼晄梫偱偟傚偆丅
嵟廔峏怴 丗 19/May/2017